| Attention | Topic was automatically imported from the old Question2Answer platform. | |
| Asked By | Mazen |
So i’m using a kinematic body 3D nd i’m changing its movement direction using mouse rotation, by getting the mouse’s basis.x nd basis.z, however when i try to calculate the distance between my player (kinematic body 3d) nd a softbody it doesn’t work well, i’ve applied the formula sqrt(pow(x2-x1,2)+pow(y2-y1,2)+pow(z2-z1,2)) but it doesnt work well
it only works when iam in certain side, if i move to the other side it doesnt work
this my code for calculating the distance:
extends Spatial
func _physics_process(delta):
var x=$KinematicBody.translation.x-$SoftBody.translation.x
var z=$KinematicBody.translation.z-$SoftBody.translation.z
var y=$KinematicBody.translation.y-$SoftBody.translation.y
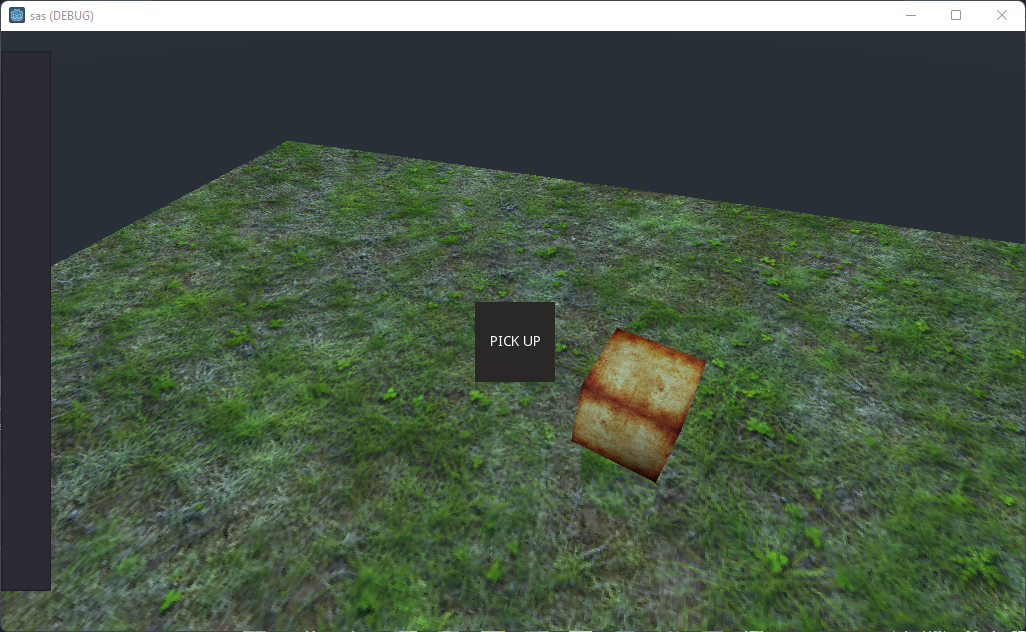
if (sqrt(pow(x,2)+pow(z,2)+pow(y,2))<2):
$Control.visible=true
if Input.is_action_just_pressed(“ui_accept”):
$ItemList.add_item(“tool”,load(“res://b65186fd210e34e35d0763332262993c.jpg”))
else:
$Control.visible=false
EDIT:
i want to let u guys know that i’ve found the reason of why the distance isnt calculated well, the reason is that both player nd softbody doesnt start at the same point, they both start with 0 coordinates but not at the same point, so now i just hav to find a way to get pass that
i want to let u guys know that i’ve found the reason of why the distance isnt calculated well, the reason is that both player nd softbody doesnt start at the same point, they both start with 0 coordinates but not at the same point, so now i just hav to find a way to get pass that
Mazen | 2023-01-20 11:45